UCR: ARCOS-Lab construye un robot humanoide
Publicado: 2019-05-08
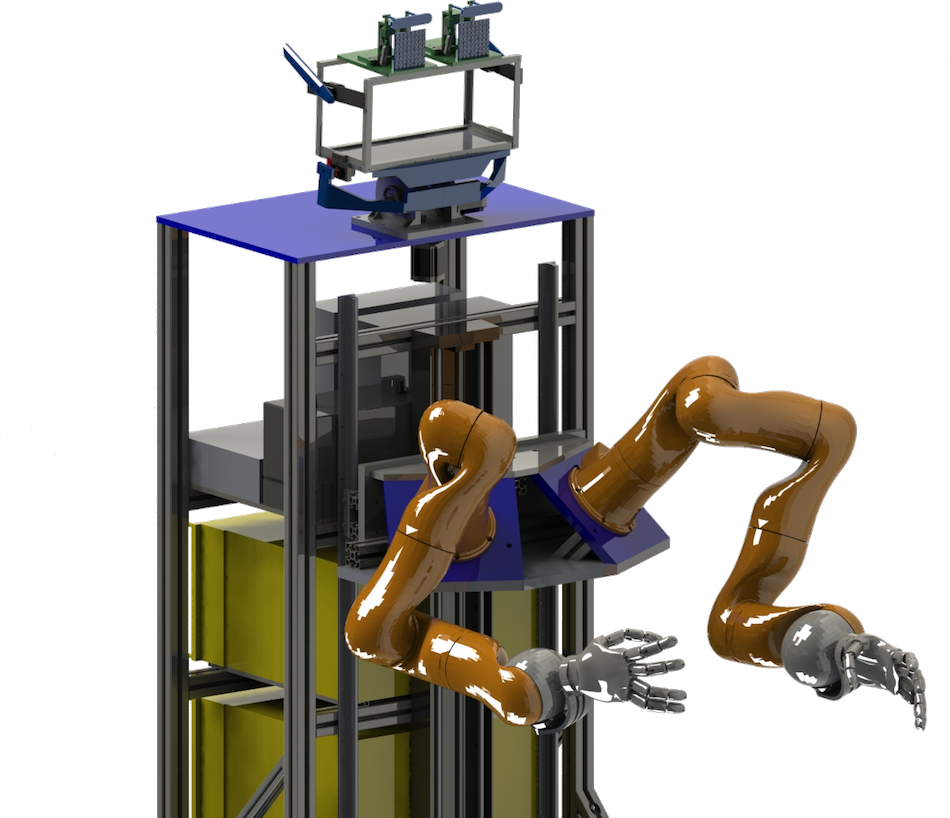
Esta máquina-humanoide podrá interactuar con el entorno en el que se desenvuelva a través de su técnica de control suave. En el recuadro: el dispositivo Open-CoRoCo, que permite al robot hacer muchos de sus movimientos. Foto cortesía de ARCOS-Lab.
Para lograr incorporar un robot en tareas conjuntas con personas, deben considerarse la diversidad de los ambientes humanos, además de los objetos presentes. El robot debe saber localizarse, comunicarse (entender intenciones y emociones) e interactuar con el ambiente físico (objetos y personas). Para conseguirlo, la máquina requiere un hardware especializado, que sea seguro con el ambiente y un software que le permita ser lo suficientemente flexible para lograr realizar una gran cantidad de tareas en condiciones variables de la vida diaria.
Lo anterior es el objetivo en el que trabaja el Laboratorio de Investigación en Robots Autónomos y Sistemas Cognitivos (ARCOS-Lab), de la Escuela de Ingeniería Eléctrica y del Instituto de Investigaciones en Ingeniería, de la Universidad de Costa Rica (UCR). Su coordinador, Federico Ruiz Ugalde, indicó que el proyecto más importante que desarrollan en este momento es un robot humanoide con capacidades avanzadas de manipulación, que le permita realizar tareas de maneras flexibles y seguras. Algunas de las partes del robot se han adquirido con dicho tipo de control, como los brazos y las manos; mientras otras no existen en el mercado, como la plataforma omnidireccional y el torso.
Ruiz mencionó que el Arcos Lab desarrolla un hardware internamente para que estas partes también sean capaces de realizar un control suave. El resultado: el proyecto Open-Coroco (Open Complaint-Robot-Controller) que le permitirá a las articulaciones elaboradas en el laboratorio ser suaves con el ambiente.
El dispositivo Open-CoRoCo, que permite al robot hacer muchos de sus movimientos.
“No solo las manos con control suave (adquiridas a un spin-off de la agencia aeroespacial alemana) son únicas en la región y en todo el continente americano, sino que en este momento no tenemos conocimiento de una plataforma omnidireccional existente en el mercado internacional que posea control suave. Esta plataforma es un desarrollo completamente interno del laboratorio, aquí en la UCR”, destacó el coordinador del ARCOS-Lab.
Como no existe garantía de la efectividad de los robots para realizar tareas manipulativas, dependiendo de la forma como este se ensamble para resolver este problema, el ARCOS-Lab desarrolló una investigación donde simuló 20 millones de objetivos manipulativos para determinar la mejor configuración de montaje para los brazos y manos del robot. De esta manera, el robot puede realizar tareas bi-manuales lo mejor posible.
Ruiz informó que el laboratorio ya terminó la construcción de una cabeza multisensorial que le permitirá al robot percibir imágenes en alta resolución a color, térmicas y tri-dimensionales, que facilitarán la detección de estos objetos. Esto es fundamental para que el aparato tenga una percepción muy flexible y confiable.
A lo anterior, es necesario aunar uno de los temas científicos centrales del laboratorio: el desarrollo de modelos matemáticos que describen el comportamiento físico de los objetos cuando estos son manipulados. Este sistema permite predecir y controlar los objetos y requiere de muy poca información previa para comenzar a manipular dichos objetos.
Gracias al hardware y software de este robot, el laboratorio logró generar una gran capacidad de prototipaje profesional, el cual le permite implementar soluciones a las problemáticas inmediatas del entorno nacional. Por ejemplo, ARCOS-Lab ha desarrollado múltiples prótesis médicas en conjunto con personal de la CCSS, por medio de su amplio conocimiento en impresión 3D. Estas herramientas han sido implantadas exitosamente en pacientes, lo que está permitiendo mejorar la calidad de vida de estas personas. Además, el laboratorio trabaja en novedosos desarrollos de control suave para la manufactura en la industria de dispositivos médicos.
Para el Dr. Henning Jensen, rector de la UCR, contar con el recurso humano altamente especializado, complementa la inversión hecha en infraestructura y equipamiento, lo cual permite desarrollar investigación transdisciplinar de alto nivel, como la que realiza el Arcos Lab. Todo lo anterior contribuye a la generación de conocimiento académico, al desarrollo con equidad y en donde prevalezca el bien común.
Prensa
Rectoría
prensa.rectoria@ucr.ac.cr